










































































 Kurşun adımı 1mm(0,0393\") sensörlü")
 Kurşun adımı 1mm(0,0393\") sensörlü")
 Kurşun adımı 2mm(0,0787\") sensörlü")
 Kurşun adımı 2mm(0,0787\") sensörlü")
 Kurşun adımı 1mm(0,0393\") sensörlü")
 Kurşun adımı 2mm(0,0787\") sensörlü")
 Kurşun adımı 2mm(0,0787\") sensörlü")
 Kurşun adımı 1mm(0,0393\") sensörlü")
 Kurşun adımı 1mm(0,0393\") sensörlü")
 Kurşun adımı 2mm(0,0787\") sensörlü")
 Kurşun adımı 12mm(0,4724\") sensörlü")
 AWG #22 Bükümlü Çift Kablo 4 Pinli JST XHP-4 Konnektörlü")


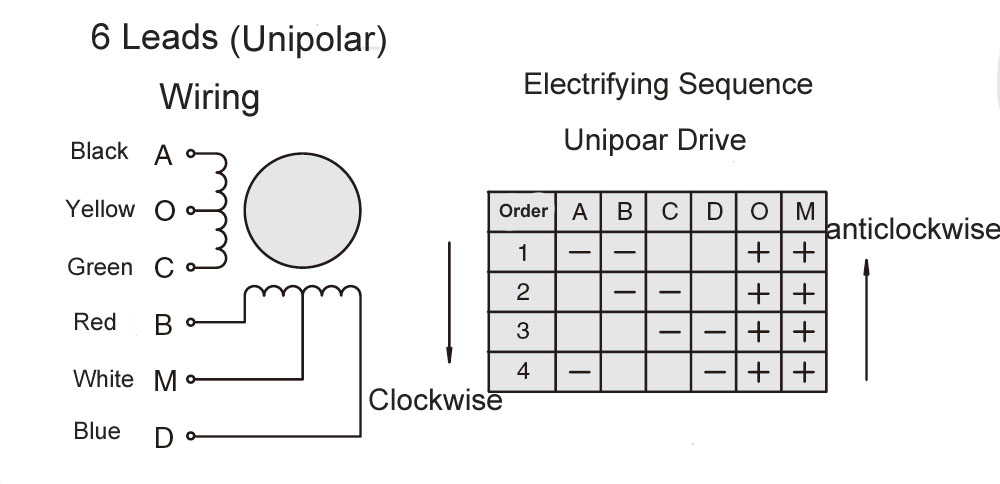
Unipolar sürücü : Motorun farklı sargıları belirli bir düzene göre sırayla uyarılır, ancak her sargının akım yönü her zaman aynıdır, buna unipolar sürücü denir.
Tek kutuplu bir sürücü devresi, bir adım motorunun iki fazını kontrol etmek için dört transistör kullanır. Motorun stator sargı yapısı, Şekil 1'de gösterildiği gibi, ortada bir musluk bulunan iki bobin setinden oluşur. Motorun tamamı dış dünyaya bağlı altı kabloya sahiptir. AC tarafı aynı anda enerjilendirilemez (aynı durum BD tarafı için de geçerlidir), aksi takdirde manyetik kutuptaki iki bobin tarafından üretilen manyetik akı birbirini nötrler ve bobinin yalnızca bakır kaybına neden olur. Aslında yalnızca iki fazı olduğundan (AC sargısı tek fazlı ve BD sargısı tek fazlıdır), doğru tanımlama iki fazlı altı kablolu adım motoru olmalıdır.
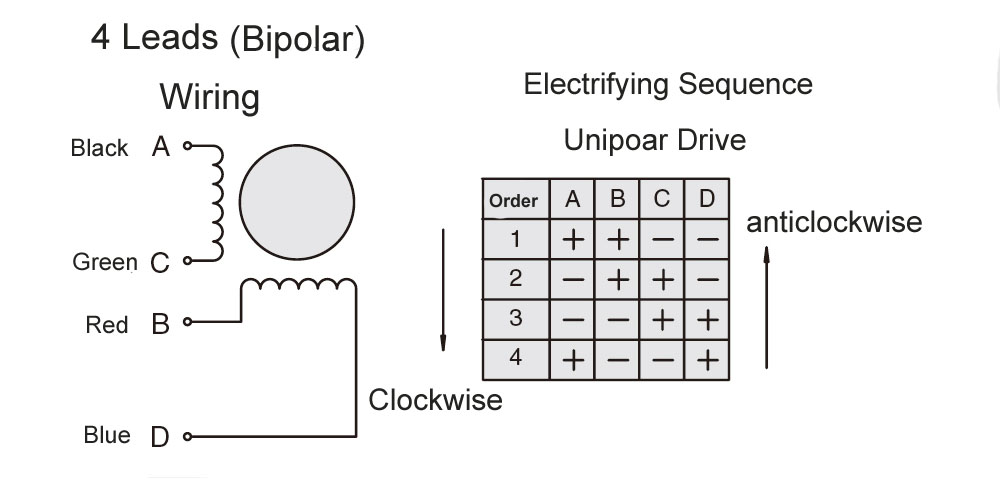
İki faz grubunu sürmek için sekiz transistör kullanan iki kutuplu bir adım motorunun sürüş devresi Şekil 2'de gösterilmiştir. Stator manyetik kutupları tek bir bobinle sarılmış ve manyetik kutbun yönü, AC ve BD bobinlerinin akım yönü değiştirilerek değiştirilmiştir. Adım motorlarının ilk geliştirme dönemlerinde, tek kutuplu motorlar, kontrol devresinde daha az transistör gerektirdikleri için yarı iletken bileşenlerin maliyeti nedeniyle bir uygulama alanı kazanmıştır. Ancak, 1950'ler ve 1960'larda yarı iletken malzemelerin hızla gelişmesiyle birlikte transistörlerin maliyeti büyük ölçüde düşmüş ve performans avantajları nedeniyle iki kutuplu motorların kullanımında keskin bir artış görülmüştür.
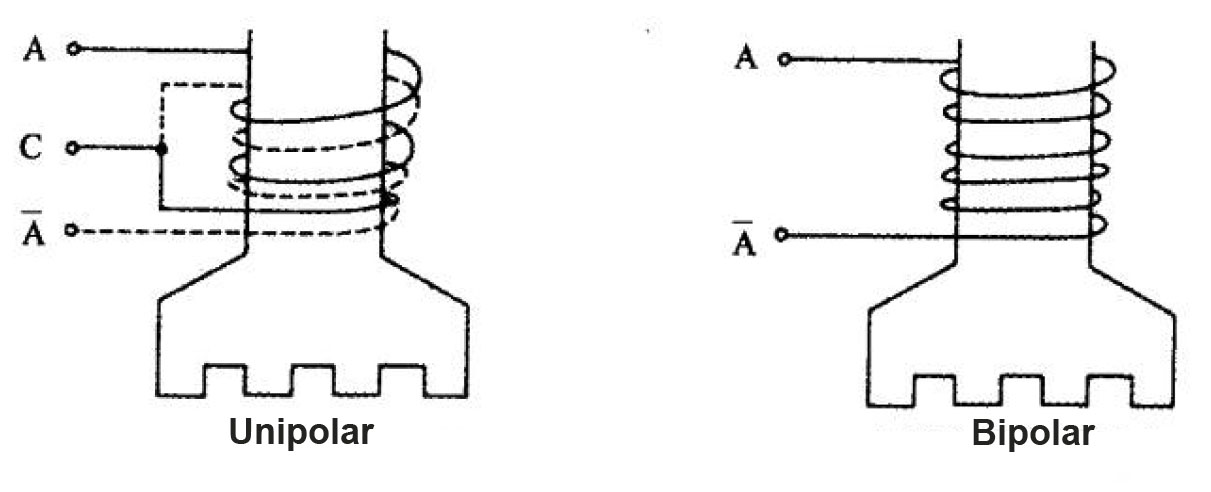
Şekil 3, tek kutuplu ve iki kutuplu olmak üzere iki sarım yöntemini göstermektedir. Tel çapı aynı olduğunda, tek kutuplu yöntemde bobin sarımının sarım sayısı N, direnç R ve iki kutuplu yöntemde bobin sarımının sarım sayısı 2N olduğunda, bobin direnci 2R'dir.
Aşağıdaki tablo, düşük hızlarda sabit voltajlı bir sürücü devresinde tek kutuplu ve çift kutuplu sürücünün verimliliğini karşılaştırmaktadır. Akım ve bobin sarımlarının çarpımı amper-tur olarak adlandırılır ve torkla orantılıdır. İki sürücü aynı hıza sahipse, çıkış gücü amper-tur ile orantılıdır. Benzer şekilde, çift kutuplu akım V/2R'dir ve sarım sayısı da 2N'dir ve çarpım tek kutuplu sürücüdekiyle aynıdır, yani VN/R'dir. Giriş sabit voltajlı sürücü durumunda, tek kutuplu ve çift kutuplu sürücüler arasındaki karşılaştırma aşağıdaki tabloda gösterilmiştir. Akım, tek kutuplu sürücünün yalnızca yarısı kadardır ve düşük hızlardaki verimlilik, tek kutuplu sürücünün iki katıdır.
Bu nedenle, küçük veya düşük hızlı uygulamalarda yüksek tork talebi olduğunda, bipolar motor ve sürücü kullanılmalıdır. Yüksek hızlı uygulamalarda, bipolar motorun tur sayısı artar, endüktans büyür ve ters EMF artar, bu da akımı ve dolayısıyla torku azaltır. Bu nedenle, torkun unipolar bir motorla karşılaştırılmasına dikkat edilmelidir.
| Tek kutuplu | Bipolar | |
| Amper Tturns | U1=V*N/R | U2=V*2N/2R=V*N/R |
| Giriş Gücü | W1=V²/R | W2=(V/2R)²*2R=V²/2R |
| Yeterlik | η=U1/W1=N/V | η=U2/W2=2N/V |
Not: V uygulanan voltajdır; R motor bobininin direncidir; N tek kutuplu sarım sayısıdır.
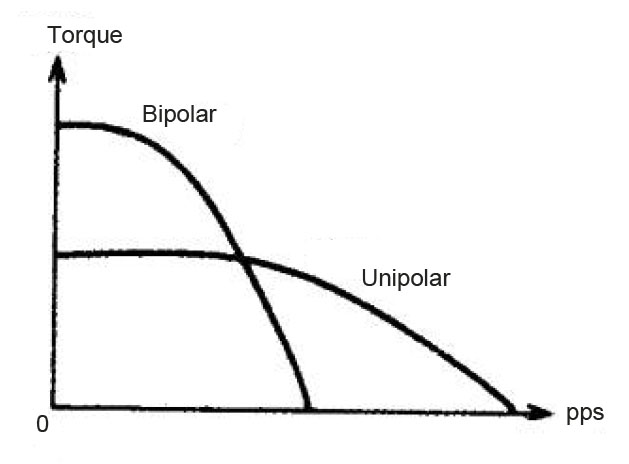
Şekil 4, aynı sabit akım sürücü modunu kullanan tek kutuplu adım motoru ve çift kutuplu adım motorunun karakteristik eğrilerini göstermektedir. Genellikle, düşük hızlı ve yüksek torklu yük uygulamalarında çift kutuplu sürücüler kullanılırken, yüksek hızlı sürücü uygulamalarında tek kutuplu sürücüler kullanılır.
 0,3 A 42x42x34 mm 6 Kablo")
 0,3 A 42x42x34 mm 6 Kablo")
 0,4A 42x42x39mm 6 Tel")
 0,4 A 42x42x48 mm 6 Kablo")
 3A 57x57x56mm 8 Kablo")
 4A 57x57x84mm 8 Kablo")
 4A 57x57x84mm 8 Kablo")
 60x60x100 mm 8 Kablo")
