









































































 AWG #22 Bükümlü Çift Kablo 4 Pinli JST XHP-4 Konnektörlü")


Bir Makale Adım Motorları Hakkında Her Şeyi Bilmenizi Sağlıyor
Lütfen ilginizi çeken herhangi bir bölümün üzerine doğrudan tıklayın.
● Step Motor Nedir?
Adım motoru, dijital darbeleri mekanik bir eksenin dönüşüne dönüştüren fırçasız senkron bir DC motordur. Diğer birçok standart motor tipinin aksine, bir adım motoru, kendisine verilen DC gerilimi kesilene kadar belirli bir devir sayısı boyunca sürekli olarak dönmez. "Fazlar" adı verilen gruplar halinde düzenlenmiş birkaç bobini vardır. Her faz sırayla açıldığında, motor adım adım döner.
Adım motorları, tüm dönme hareketini birkaç eşit adıma böler. Motor, uygulamanın tork ve hızına uygun boyutta olduğu sürece, motorun konumu bu adımlardan birinde hareket edecek ve konum sensöründen herhangi bir geri bildirim almadan aynı konumda kalacak şekilde kontrol edilebilir.
Ayrıca, bir adım motoru dijital bir giriş ve çıkış aygıtıdır. Kontrol sinyalinin analog voltajlar şeklinde değil, dijital darbeler şeklinde olduğu uygulamalar için özellikle uygundur. Bir adım motoru sürücüsüne gönderilen dijital bir darbe, motorun belirli bir hareket açısını artırmasına neden olur. Dijital darbelerin frekansı arttıkça, adım hareketi sürekli bir dönüşe dönüşür.
Bilgisayar kontrollü adımlama ile çok hassas konumlandırma ve/veya hız kontrolü elde edebilirsiniz. Sonuç olarak, adım motorları birçok hassas hareket kontrol uygulaması için tercih edilen motor haline gelmiştir.
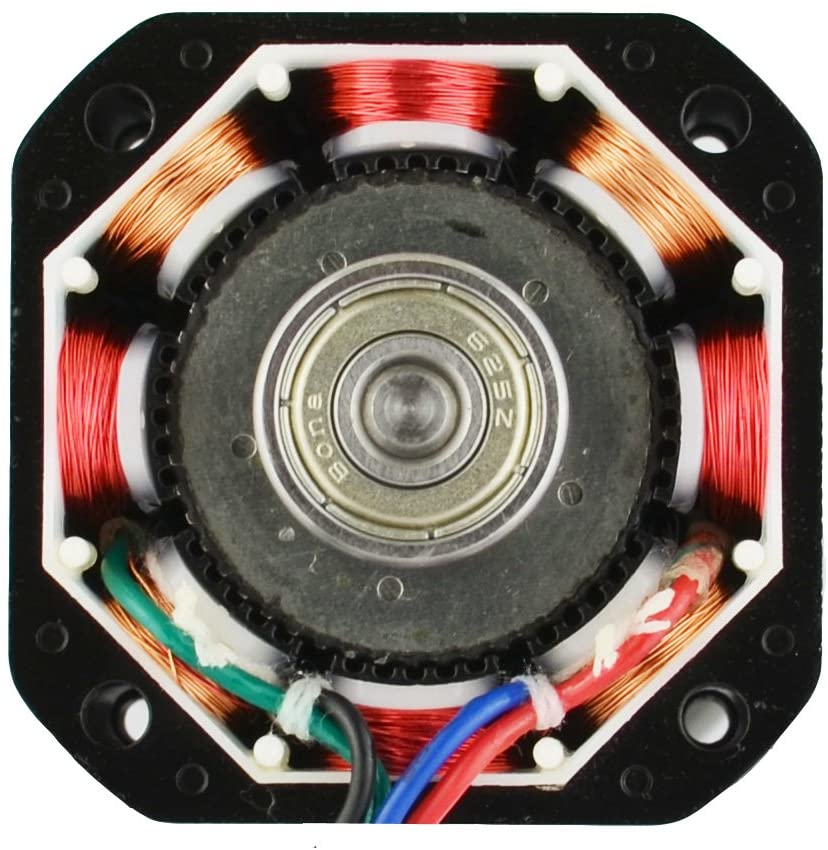
● Step Motor Nasıl Çalışır?
Akım stator sargısından geçtiğinde, stator sargısı bir vektör manyetik alanı oluşturur. Bu manyetik alan, rotoru belirli bir açıyla dönmeye zorlar, böylece rotor manyetik alanının yönü stator manyetik alanının yönüyle tutarlı olur. Statorun vektör manyetik alanı bir açıyla döndüğünde, rotor da bu manyetik alana göre bir açıyla döner. Her elektrik darbesi girişinde, motor bir açı döner ve bir adım ileri gider. Çıkış açısal yer değiştirmesi, giriş darbelerinin sayısıyla orantılıdır ve dönüş hızı darbe frekansıyla orantılıdır. Sargıların enerjilendirildiği sırayı değiştirin ve motor yönünü tersine çevirecektir. Bu nedenle, adım motorunun dönüşü, motorun her faz sargısının darbe sayısı, frekansı ve enerjilendirme sırası kontrol edilerek kontrol edilebilir.
Yaygın motor tiplerinin içinde demir çekirdekler ve sargı bobinleri bulunur. Sargının direnci vardır ve elektrik uygulandığında kayıplara neden olur. Kaybın büyüklüğü, direnç ve akımın karesiyle orantılıdır. Buna genellikle bakır kaybı denir. Akım standart bir DC veya sinüs dalgası değilse, harmonik kayıp da meydana gelir; demir çekirdekte histerezis olur. Eddy akımı etkisi de alternatif manyetik alanda kayıplara neden olur ve boyutu malzeme, akım, frekans ve voltajla ilişkilidir. Buna demir kaybı denir.
Hem bakır hem de demir kayıpları ısı şeklinde ortaya çıkar ve motorun verimliliğini etkiler. Adım motorları genellikle konumlandırma hassasiyeti ve tork çıkışına odaklanır ve verimlilikleri nispeten düşüktür. Akım genellikle daha büyüktür ve daha yüksek harmonik içeriğe sahiptir. Akım değişiminin frekansı da dönüş hızındaki değişimle birlikte değişir. Bu nedenle, adım motorlarının normalden daha fazla ısınması yaygındır.
Motor, elektrik enerjisini mekanik enerjiye dönüştürür ve adım motoru, elektriksel darbe sinyallerini açısal veya doğrusal deplasmana dönüştüren açık devre bir kontrol elemanıdır. Aşırı yük olmayan koşullar altında, motorun hızı ve durma konumu yalnızca darbe sinyalinin frekansına ve darbe sayısına bağlıdır ve yük değişimlerinden etkilenmez. Başka bir deyişle, motora bir darbe sinyali eklenirse, motor bir adım açısı kadar dönecektir. Bu doğrusal ilişkinin varlığı, adım motorunun yalnızca periyodik hatalara sahip ve birikmiş hata içermeyen özellikleriyle birleştiğinde, adım motorlarını hız, konum ve diğer kontrol alanlarında kontrol etmek çok kolay hale gelir.
● Adım Motoru Boyutu
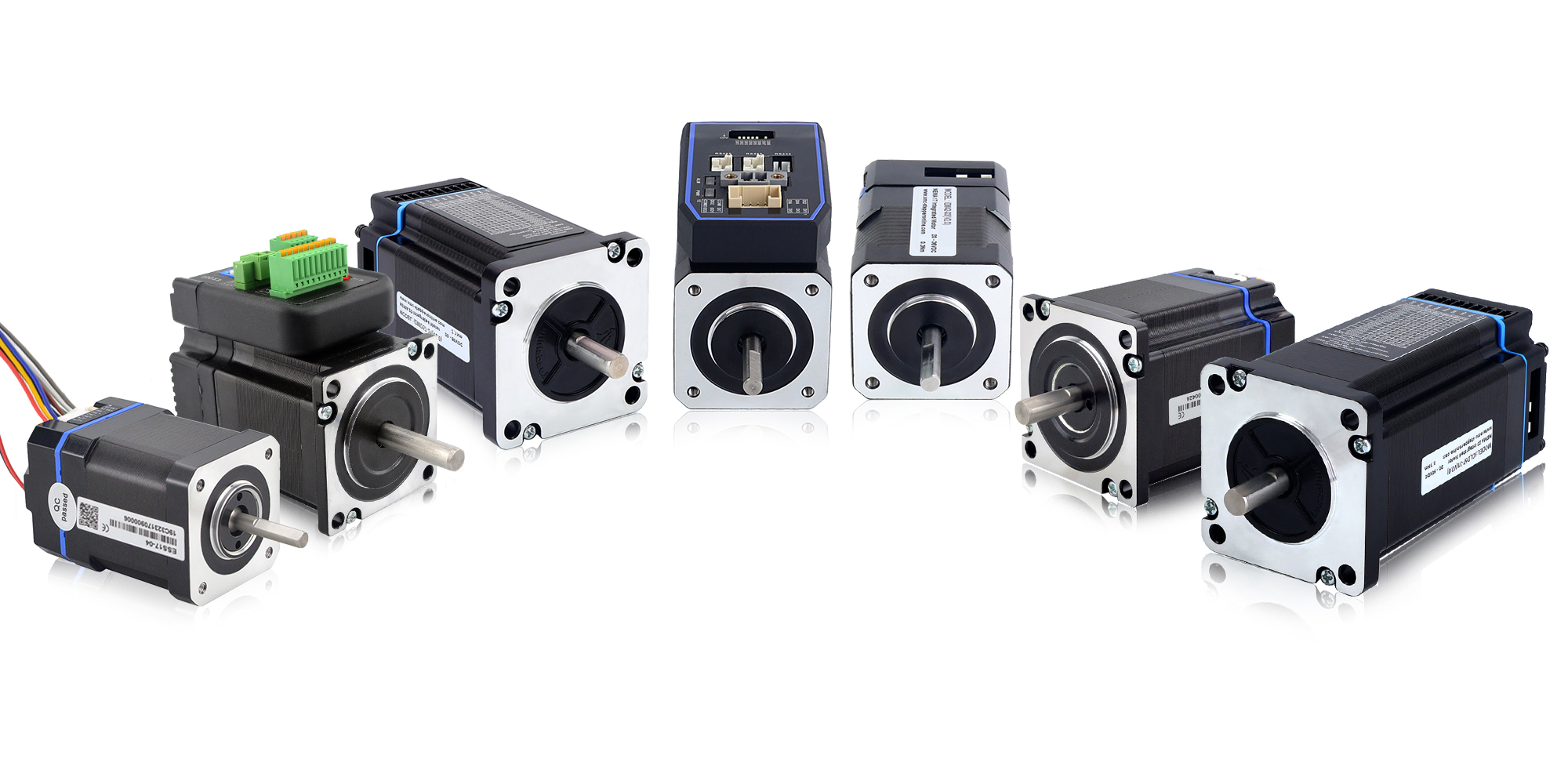
Adım motorları, "Nema 17" veya "Nema 23" gibi gövde boyutlarına göre sınıflandırılır. Bunun nasıl olduğunu veya ne anlama geldiğini hiç merak ettiniz mi? Amerikan Elektrik Üreticileri Birliği, adım motorları da dahil olmak üzere birçok elektrikli ürün için standartlar belirler. Genel olarak "Nema 17", motorun montaj yüzeyinin 1,7 inç kare olduğu anlamına gelir. Dolayısıyla, Nema 23 adım motorunun boyutları 2,3 inç karedir. Yani aşağıda gösterildiği gibi 57 mm.
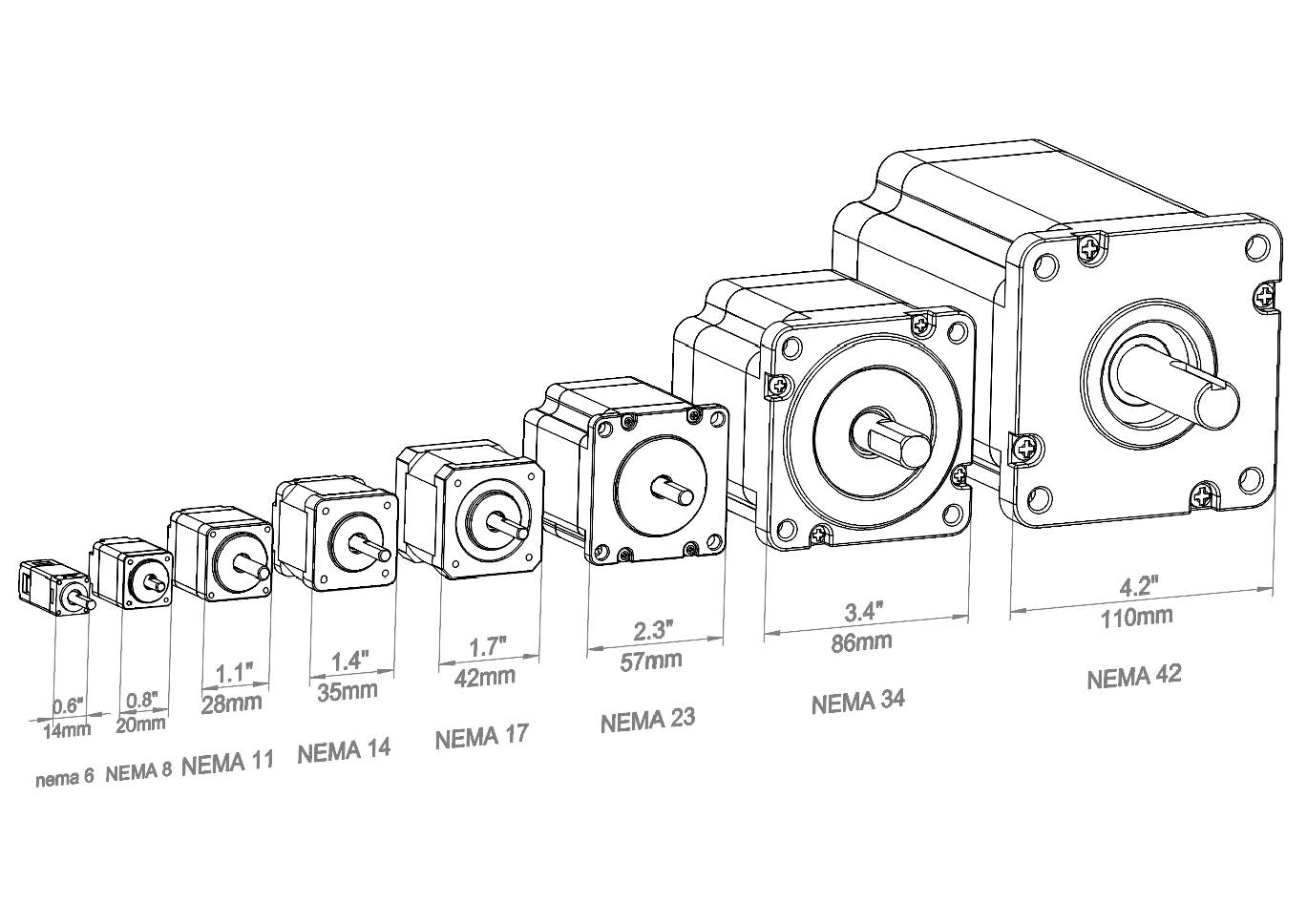
Aşağıdaki fotoğrafta Nema 06, 08, 11, 14, 17, 23, 24, 34 ve 42 numaralı adım motorları gösterilmektedir. 24 numaralı boyut biraz sıra dışıdır - 24 numaralı boyut için resmi bir Nema tanımı yoktur. 23 numaralı boyuta benzer şekilde monte edilir, ancak biraz daha geniştir (yaklaşık 4 mm), bu da daha büyük rotor ve stator kullanımına ve dolayısıyla yaklaşık %30 daha fazla torka olanak tanır.

Üreticiler, önerilen standart konusunda esasen hemfikirdir. Bu, üreticilere daha fazla tasarım esnekliği sağlar çünkü bir Nema 17 motorunun, özellikle motor tedarikçilerini değiştirmeye karar verdiklerinde, herhangi bir şeyi yeniden tasarlamak zorunda kalmadan başka bir Nema 17 yuvasına uyacağını önceden bilirler.
● Adım Motoru Türleri
STEPPERONLINE tarafından satılan birçok tipte step motor bulunmaktadır ve farklı tipteki step motorların özelliklerini ve kullanımlarını anlamak, sizin için en iyi tipin hangisi olduğuna karar vermenize yardımcı olacaktır.
Hibrit adım motoru, değişken relüktanslı ve kalıcı mıknatıslı motorun birleşimidir. Stator, değişken relüktanslı adım motoru gibi elektromanyetik olarak uyarılır ve adım motorunun rotoru, kalıcı mıknatıslı adım motoru gibi eksenel olarak mıknatıslanır. Bu adım motoru, elektrik darbelerini açısal yer değiştirmeye dönüştüren bir aktüatördür.
Diğer iki adım motoru türüne kıyasla, hibrit adım motorları daha küçük adım açısıyla daha yüksek tork sağlar ve daha iyi bir dinamik özelliğe sahiptir. Bilim ve teknolojinin, özellikle kalıcı mıknatıs malzemelerinin, yarı iletken teknolojisinin ve bilgisayar teknolojisinin gelişmesiyle birlikte, bu adım motorları endüstriyel otomasyon, robotik, tekstil ve tıp endüstrilerinde yaygın olarak kullanılmaktadır.
Kapalı devre adım motoru, kapalı devre kontrolü sağlamak için motor ucuna bir kodlayıcı eklenen bir adım motorudur. Bir adım motorunun kapalı devre kontrolü, rotor konumuna uygun faz değişimini belirlemek için konum geri beslemesi ve/veya hız geri beslemesi kullanan bir servo sistemidir. Bu sistem, adım kaybı olmadan adım motorunun performansını büyük ölçüde artırabilir.
Kapalı devre adım motoru çift sargılı bir yapıya sahiptir ve motoru yüksek hassasiyetli doğrusal bir kodlayıcı kullanır. Motor her bir kareyi döndürdüğünde, kodlayıcı bir darbe çıkışı verir, böylece motorun doğru dönüş konumu elde edilebilirken, sıradan adım motorlarında yalnızca bir tane bulunur. Sargı konumu ve motor dönüşü güvenilir değildir.

Kapalı devre adım motoru, referans darbesi girişi gerektiren mandal kontrolünü benimser. Geri besleme kontrolü sayesinde kontrol darbesi senkronize edilebilir. Motorun dönüş konumu sabit tutulabilirken, sıradan adım motoru açık devre kontrolü kullanır ve referans darbesi girmesine gerek yoktur. Sadece motorun adım frekansı ve yönünün kontrol edilmesi gerekir ve motorun dönüş konumu kontrol edilemez.
Kapalı devre adım motorları, sıradan adım motorlarıyla karşılaştırıldığında daha yüksek dinamik tepki kabiliyetlerine sahiptir ve küçük konum hatalarıyla hassas dönüş konumu kontrolü sağlayabilir. Dahası, yüksek hassasiyete sahiptir ve konum doğruluğu 0,1 derece içinde kontrol edilebilirken, sıradan adım motorlarının konum doğruluğu yalnızca 1 derece içinde kontrol edilebilir ve bu da düşük çalışma kararlılığı ve büyük konum hatalarına neden olur.
Ayrıca, kapalı devre adım motorları daha yüksek yük kapasitesine sahiptir ve daha büyük yüklere dayanabilirken, sıradan adım motorları daha düşük yük kapasitesine sahiptir ve daha zayıf dayanıklılığa sahiptir.
Entegre adım motorları, adım sürücülerini ve motorları tek bir ünitede birleştirir. Entegre adım motorları, ayrı motor ve sürücü bileşenlerine kıyasla kablolamayı azaltan ve maliyet tasarrufu sağlayan yerden tasarruf sağlayan bir tasarım sunar. Paketleme ve etiketleme, otomatik test ve ölçüm, otomatik montaj ve yaşam bilimleri gibi uygulamalar için idealdir.
Motor ve tahrik ünitelerinin entegre edilmesinin diğer faydaları arasında uygulama kolaylığı, kablolama karmaşıklığının azaltılması, daha hızlı sistem kurulumu ve tasarımı ve garantili motor-tahrik uyumluluğu yer alır.
● Kalıcı Mıknatıslı Adım Motoru
Kalıcı mıknatıslı motorlar, rotorda kalıcı bir mıknatıs (PM) kullanır ve rotor mıknatısı ile stator elektromıknatısları arasındaki çekim veya itme ile çalışır. Kalıcı mıknatıslı adım motorunun rotoru, kalıcı mıknatıs çeliğinden yapılır. Adım motorunun statoru, presleme yöntemiyle pençe şeklinde bir diş kutbuna dönüştürülür ve rotor, radyal çok kutuplu mıknatıslanma özelliğine sahip kalıcı mıknatıslı bir çelikten yapılır. Bobin akımının yönüyle oluşan manyetik alan, rotor manyetik alanıyla karşılıklı olarak birbirini dışlar, böylece motor ters yönde döner.
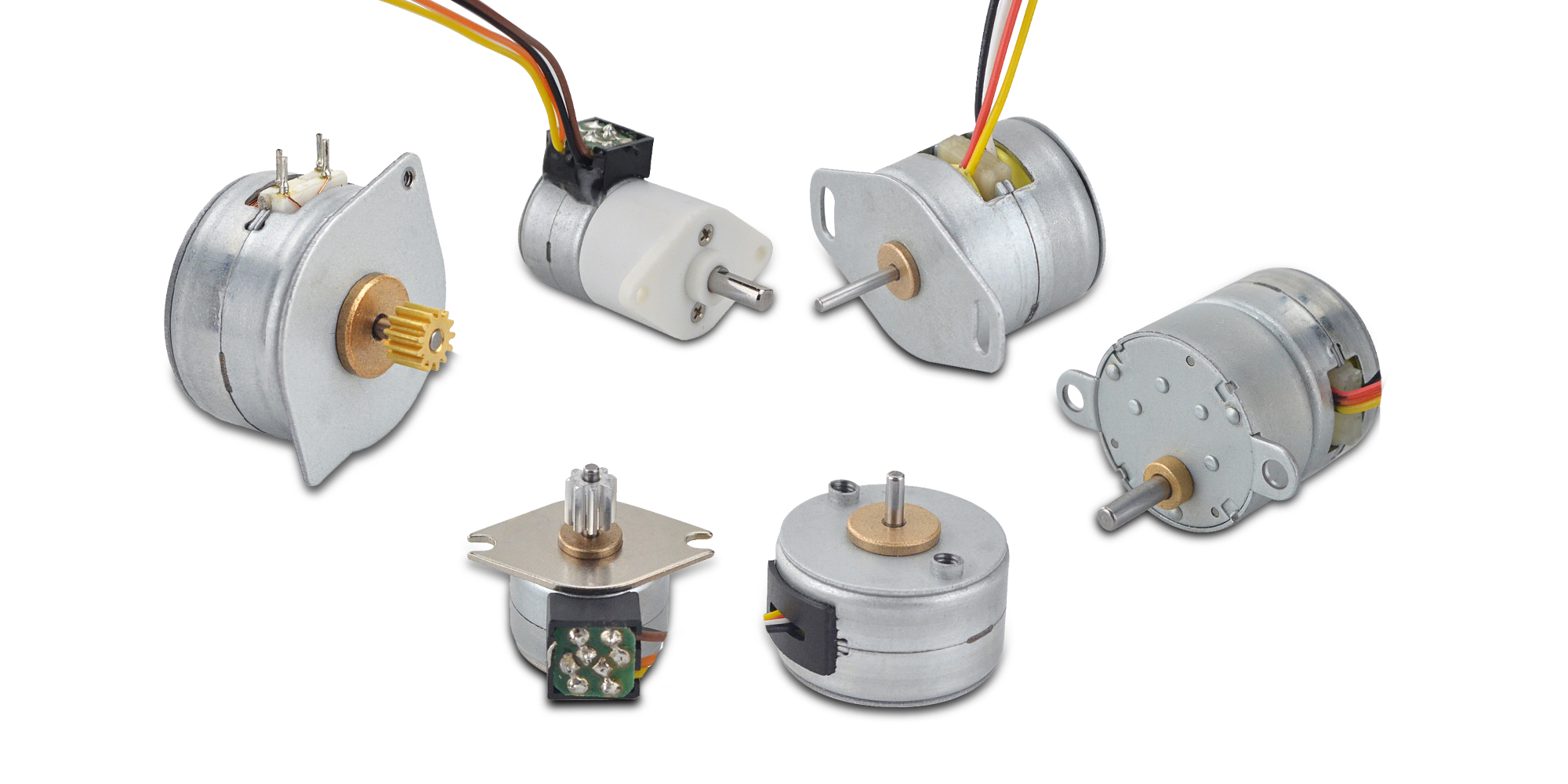
Bu adım motoru, pm adım motoru olarak da bilinir. Motor statoru ve rotorunun eksenel yönü iki bölüme ayrılmıştır ve orta kısım manyetik bir ayırma parçasıyla ayrılmıştır. İki bölüm, bir adım açısıyla karşılıklı olarak ayrılmıştır ve her biri bir stator, bir rotor ve stator üzerine yerleştirilmiş bir halka sargısından oluşur. pm adım motoru, çoğunlukla bilgisayar çevre birimlerinde, fotoğrafik sistemlerde, optoelektronik kombinasyon cihazlarında, valf kontrolünde, nükleer reaktörlerde, bank terminallerinde, CNC takım tezgahlarında, otomatik sarma makinelerinde, elektronik saatlerde ve tıbbi cihazlarda vb. kullanılır.
● Değişken Relüktanslı Adım Motoru
Değişken relüktanslı adım motoru, manyetik relüktans prensibiyle çalışan bir elektrik motoru türüdür. Bu motor, demir bir rotor ve birkaç stator sargısından oluşur. Sargılar belirli bir sırayla mıknatıslanır ve rotorun ayrı adımlarla hareket etmesini sağlar.
Değişken relüktanslı adım motorları, düşük hızlarda yüksek adım hızları ve iyi tork sağlar. Ancak, daha yüksek hızlarda rezonans sorunları nedeniyle performans daha az tatmin edici olabilir.
Değişken relüktanslı adım motorları, motorun zorlu koşullara maruz kalabileceği ortamlar için uygun olan, sağlam ve güvenilir olarak kabul edilir.
Değişken relüktanslı adım motorlarının temel dezavantajlarından biri, diğer adım motor türlerine göre daha gürültülü olma eğiliminde olmalarıdır. Bunun nedeni, rotorun zayıf sönümlenmesi ve bunun sonucunda daha yüksek mekanik titreşim seviyelerine sahip olmalarıdır.
Doğrusal adım motorları, tasarımı ve çalışma prensipleri geleneksel döner adım motorlarından farklı olan özel bir adım motoru türüdür. Doğrusal adım motoru, geleneksel adım motorlarının elde ettiği dönme hareketi yerine doğrusal hareketle doğrusal yer değiştirme elde eden doğrusal bir motordur. Doğrusal bir adım motorunun yapısı genellikle sabit bir stator ve hareketli bir kaydırıcıdan oluşur. Statorun içinde bobinler, kaydırıcı ise kalıcı mıknatıslar bulunur. Akım stator bobininden geçtiğinde bir manyetik alan oluşur. Kaydırıcıdaki kalıcı mıknatıs ile statorun manyetik alanı arasındaki etkileşim bir çekim veya itme kuvveti oluşturarak kaydırıcının sabit eksende doğrusal hareket etmesini sağlar. Doğrusal bir adım motorunun kontrolü, geleneksel bir adım motoruna benzer. Akımın yönü ve büyüklüğü kontrol edilerek kaydırıcının konumu ve hızı kontrol edilebilir. Her adım motorunun darbe sinyali, kaydırıcıyı sabit bir adım hareket ettirir, böylece hassas doğrusal yer değiştirme elde edilebilir.

Üç yaygın lineer adım motoru türü vardır: harici tahrikli, şaftlı ve sabit şaftlı. Belirli uygulamaların temel göstergelerine göre seçilebilirler. Lineer adım motorları, yüksek hassasiyet, sıfır boşluklu iletim ve hızlı tepki gibi avantajlara sahip olduğundan, yüksek performanslı doğrusal hareket kontrolü gerektiren uygulamalarda tercih edilirler.
● Unipolar ve Bipolar
Adım motoru, dönüş açısını elektrik darbeleriyle kontrol eden bir motordur. Bipolar adım motorları ve unipolar adım motorları, iki yaygın adım motoru türüdür. Aralarındaki temel fark kontrol yöntemidir. Bipolar bir adım motorunun, rotorun yönünü değiştirmek için akımı ters çevirmesi gerekir, bu nedenle yönü kontrol etmek için 4 elektrota ihtiyaç duyar ve her elektrotun iki durumu (AÇIK/KAPALI) vardır.
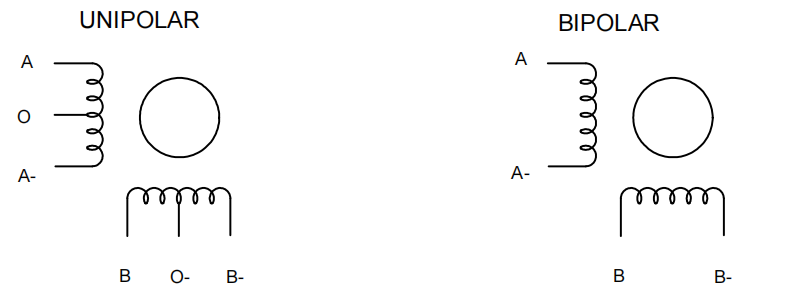
Tek kutuplu bir adım motoru, rotorun dönüşünü kontrol etmek için yalnızca iki elektroda ihtiyaç duyar ve motor, akımın yönünü değiştirerek döner. Bu nedenle, çift kutuplu adım motorlarıyla karşılaştırıldığında, tek kutuplu adım motorları aynı hareket kontrolünü sağlamak için yalnızca iki elektroda ihtiyaç duyar. Ancak, tek kutuplu adım motorları kontrol devresine tek kutuplu bir sürücü eklenmesini gerektirdiğinden, devre karmaşıklığı biraz daha yüksektir.
Bipolar adım motorları ve unipolar adım motorlarının her birinin kendine özgü avantajları ve dezavantajları vardır ve uygun motor, belirli uygulama senaryosuna göre seçilebilir.
Bipolar adım motorlarının avantajları yüksek tork, yüksek hız, yüksek hassasiyet ve basit kontroldür, bu nedenle genellikle yüksek hız ve yüksek hassasiyet gerektiren durumlarda kullanılırlar. Tek kutuplu adım motorlarının torku ve hassasiyeti, çift kutuplu adım motorlarıyla karşılaştırılır. Motor daha kötü ve daha yavaştır. Ayrıca, tek kutuplu adım motorlarında kullanılan sürücüler pahalıdır ve daha az seçeneğe sahiptir.
● Step Motor, Sürücü ve Güç Kaynağı Nasıl Seçilir?
Hareketi kontrol etmeniz gerektiğinde adım motorları iyi bir seçimdir. Dönüş açısı, hız, konum ve senkronizasyon kontrolünün gerekli olduğu senaryolarda kullanılabilirler.
Bu nedenle step motor seçerken dikkat etmemiz gereken birkaç faktör vardır.
1. Motor yüke nasıl bağlanır?
Motor ve yük arasındaki bağlantı tipini belirledikten sonra, şaft uzunluğuna, çapına ve şaft tipine göre bir adım motoru seçebilirsiniz. STEPPERONLINE standart adım motorları şu anda çeşitli şaft uzunluklarına, şaft çaplarına ve şaft tiplerine sahip olup, motor şaftı için çeşitli özelleştirilmiş hizmetler sunabilmektedir.2. Yükün ne kadar hızlı hareket etmesi veya hızlanması gerekiyor?
Doğru motoru seçerken, hız ve yük arasındaki dengeyi göz önünde bulundurmanız gerekir. Hızlı hareket gerektiren bazı ekipmanlar için yüksek hızlı motorlar tercih edebiliriz, ancak yük daha büyükse, daha yüksek torklu bir motor seçmemiz gerekir. Bu nedenle, bir motor seçerken, gerçek ihtiyaçlara göre hız ve yük arasındaki dengeyi göz önünde bulundurmalı ve hem hareket hızını hem de yükü karşılayabilecek bir motor seçmelisiniz. Aşağıda, her boyuttaki motorun yüksüz durumdaki maksimum hızı ve önerilen hızı verilmiştir.
| Yüksüz Hız | |||
| Motor Tipi | Boyutlar (mm) | Maksimum Hız (dev/dak) | Önerilen Çalışma Hızı (dev/dak) |
| Açık Döngü Motoru | Nema 6(14x14) | 1000 | 100-600 |
| Nema 8(20x20) | 1000 | 100-600 | |
| Nema 11(28x28) | 1000 | 100-600 | |
| Nema 14(35x35) | 1000 | 100-600 | |
| Nema 16(40x40) | 1000 | 100-500 | |
| Nema 17(42x42) | 1000 | 100-500 | |
| Nema 23(57x57) | 1000 | 100-500 | |
| Nema 24(60x60) | 1000 | 100-500 | |
| Nema 34(86x86) | 1000 | 100-400 | |
| Nema 42(110x110) | 500 | 100-300 | |
| Kapalı Döngü Motoru | Nema 8(20x20) | 2000 | 100-1500 |
| Nema 11(28x28) | 2000 | 100-1500 | |
| Nema 14(35x35) | 2000 | 100-1000 | |
| Nema 17(42x42) | 2000 | 100-1000 | |
| Nema 23(57x57) | 1500 | 100-1000 | |
| Nema 24(60x60) | 1500 | 100-1000 | |
| Nema 34(86x86) | 1500 | 100-1000 | |
Motor eğrisi diyagramına bakarak motorun yük hızı gereksinimlerinizi karşılayıp karşılamadığını da belirleyebilirsiniz.
3. Yükü hareket ettirmek için ne kadar tork gereklidir?
Çoğu motorun tork değerleri vardır. Motorun istediğinizi yapabilecek güce sahip olup olmadığına karar vermek için buna bakmanız gerekir. Bir adım motorunun tutma torku, geleneksel bir motorun "gücüne" benzer. Ancak, adım motorlarının fiziksel yapısı AC ve DC motorlardan tamamen farklıdır ve motorun çıkış gücü hıza, akıma ve giriş voltajına bağlı olarak değişir.
Genel olarak, gerekli tork 0,8 Nm'den azsa Nema 8 (20x20 mm), Nema 11 (28x28 mm), Nema 14 (35x35 mm), Nema 16 (39x39 mm), Nema 17 (42x42 mm) tercih edilmelidir; tork yaklaşık 1 Nm ise Nema 23 step motor tercih edilmelidir. Tork birkaç Nm'den fazlaysa, Nema 34 ve Nema 42 gibi özelliklere sahip bir step motor tercih edilmelidir.
4. Yük konumlandırılırken ne kadar hassasiyet gereklidir?
Adımlar küçüldükçe adım motorlarının hassasiyeti artar. Bunun nedeni, bir devrin daha dikkatli ve daha fazla sayıda adıma bölünmesi ve bu sayede hata payının daha az olmasıdır. Örneğin, 0,9° açılı bir adım motoru, 1,8° açılı bir adım motoruna göre daha yüksek hassasiyet sunar.
Yaygın bir yanılgı, yarım adımlarla çalışan 1,8° motorların tam adımlarla çalışan 0,9° adım motorlarıyla aynı doğruluğu sağlayacağıdır. Bir diğer yanılgı ise 0,9° adım motoru kullanıldığında tork kaybı olduğudur. Bu varsayımlar yanlıştır ve mekanik tasarım özelliklerinin anlaşılması bunun nedenini açıklayabilir.
Genel olarak, 0,9° adım motorları yüksek hız ve yüksek hassasiyet uygulamaları için en uygunudur. 1,8° adım motorları ise daha yüksek tork ancak daha düşük hassasiyet sunar. Patentli 12 kutuplu tasarıma sahip 0,9° adım motorları da mevcuttur. Bu daha gelişmiş motorlar, 0,9° ve 1,8° motorların özelliklerini bir araya getirerek yüksek hassasiyet ve daha yüksek tork sunar.
● Adım Motoru Sürücüsünü Seçin
Adım motorunuzdan en iyi şekilde yararlanmak için uygun sürücüyü kullanmanız gerekir. Sürücü seçerken aklınızda bulundurmanız gereken üç temel unsur vardır: voltaj, akım, mikrostep ve faz sayısı. Her biri motorun performansında önemli bir rol oynar. Bu parametrelerin dikkate alınmaması, düşük performansa, daha yüksek gürültüye, hatta motorun aşırı ısınmasına ve arızalanmasına yol açarak üretim süresi kaybına ve bakım maliyetlerinin artmasına neden olabilir.
1. Anma gerilimi
Motorun maksimum nominal geriliminin aşılması veya daha yüksek bir besleme gerilimi ile çalıştırılması motorun arızalanmasına neden olabilir. Bu nedenle, bir step motor sürücüsü seçerken ürün açıklamasından veya tork eğrisinden motorun maksimum nominal gerilimini veya tipik nominal gerilimini bilmelisiniz. Step motorlar genellikle AC (120V veya 240V) veya düşük voltajlı DC (24V, 36V veya 48V gibi) ile çalışan sürücülerle çalıştırılır. 24VDC için derecelendirilmiş bir motor gibi, belirtilenden daha yüksek bir voltajda bir motoru yüksek bir voltajda çalıştırırsanız, motor hızla aşırı ısınır. Tersine, çok düşük bir voltajda çalıştırılan bir motor (örneğin 24VDC'de çalışan yüksek voltajlı bir motor) daha az güç üretecek ve yük azaltılmazsa motorun durmasına neden olabilir.
2. Mevcut Derecelendirme
Sürücünün geniş bir akım aralığına uygun olduğundan emin olun, böylece sistemi uygulamanıza uygun farklı voltajlarda test edebilirsiniz. Akım değeri için hem sürekli veya etkin akımı hem de tepe akım gereksinimini göz önünde bulundurmalısınız. Fırçalı ve fırçasız DC motorlarda, başlatma ve durdurma sırasında ters EMF mevcut değildir ve sürücü yalnızca motorun sargı direncini görür. Bu nedenle, motor dönmeye başlamadan önce bir akım dalgalanması olur ve besleme voltajına zıt bir ters EMF oluşturarak akım tüketimini azaltır. Uygulamanız normal çalışma sırasında yalnızca maksimum 1A sürekli akım gerektirse bile, başlatma ve durdurma sırasında 2 ila 3 kat veya daha fazla sürekli akımı işlemesi gerekebilir.
3. Mikroadımlama
Adım motorları normalde 1,8°'lik adımlarla, yani devir başına 200 adımla hareket eder. Küçük hareketlere ihtiyacımız varsa bu bir sorun olabilir. Bir seçenek dişli kutusu kullanmak olabilir, ancak başka bir seçenek de var: mikro adımlama. Mikro adımlama, devir başına 200'den fazla adım ve dolayısıyla daha küçük hareketler elde edebileceğimiz anlamına gelir.
Adım motorları tam adımlarla çalıştırıldığında, adım motoru sürücüsünün çıkışı kare dalga sinyali gibi görünür ve kaba hareketler üretir. Mikro adımlar ne kadar büyükse, çıkış sinyali o kadar sinüs dalgasına benzer ve adım motoru daha akıcı hareket eder. Ancak bunun bir dezavantajı da vardır. Mikro adım değeri arttıkça tork keskin bir şekilde düşer ve değer çok büyükse, motor hiç dönmeye yetecek tork üretemez. Normalde, tatmin edici derecede akıcı hareketler elde etmek ve yine de yeterli tork üretmek için 1/4, 1/8 veya hatta 1/16 kullanılabilir.
4. Aşama sayısı
Adım motoru sürücüleri, belirli sayıda fazı kontrol etmek için kullanılır. Tipik tek kutuplu ve iki kutuplu adım motorları için iki fazlı sürücüler kullanılırken, değişken relüktanslı motorlar için üç fazlı sürücüler kullanılır. Sürücüyü seçmeden önce, lütfen motorun faz numarasını doğrulayın.
Adım motoru kullanırken, adım motoruna güç sağlamak için bir güç kaynağına ihtiyacınız olacaktır. Doğru bir güç kaynağı, adım motorunuzun optimum performansta çalışmasını sağlayabilir. Ancak yanlış bir güç kaynağı, düşük performansa veya daha fazla enerji israfına neden olabilir.
Güç kaynağı seçimi için birkaç ipucu:
| Motor Boyutu | Sürüş Voltajı |
| Nema 8 - Nema 17 | 12 - 24VDC |
| Nema 23, Nema 24 | 24 - 48VDC |
| Nema 34 | 48 - 100VDC/30 - 70VAC |
| Nema 42 - Nema 52 | 110 - 220VAC |
- Motorun nominal akımını doğrulayın. Bunu motor veri sayfasında bulabilirsiniz.
- Sürüş voltajını doğrulayın. Sürüş voltajı, bir güç kaynağı seçerken ana faktördür. Normalde, daha yüksek voltaj daha iyi performans sağlar.
Aşağıdaki tabloda adım motorları için önerilen voltaj değerleri verilmiştir, uygulamanıza göre doğru voltajı seçebilirsiniz.
Güç değerini hesaplayın. Sizin için basit bir formül sunuyoruz:
P=n*I*V*1.2P: Güç değeri
n: Adım motorlarının sayısı
I: Motor anma akımı
V: Sürüş voltajı
1.2: %20 marj anlamına gelir
örneğin, her biri 3A nominal akıma sahip 3 adet motor ve sürüş voltajı 36V ise, tahmini güç yaklaşık olarak şu şekildedir: 3*3A*36V*1.2=388.8W. bu nedenle, 36V 400W güç tedarikçisi seçebilirsiniz.
Lütfen dikkat: Formül yalnızca tahmini bir güç değeridir; farklı çalışma koşulları farklı güçler gerektirecektir. Örneğin, 3 eksenli bir sistemde, 3 motorun tamamı aynı anda çalışmayabilir ve 3 motorun tamamı maksimum yükte çalışmayabilir. Bu durumda, güç değeri formülle hesaplanan değerden düşük olabilir.
● Adım Motorlarının Avantajları ve Dezavantajları
Adım Motorlarının Avantajları
- İç yapıları gereği, adım motorları motor konumunu algılamak için sensörlere ihtiyaç duymaz. Motor "adımlar" halinde hareket ettiğinden, belirli bir andaki motor konumu, bu adımları sayarak kolayca belirlenebilir.
- Adım motorlarının kontrolü de oldukça kolaydır. Motor bir sürücü gerektirse de, düzgün çalışması için karmaşık hesaplamalar veya ayarlar gerektirmez. Genel olarak, kontrol için gereken iş miktarı diğer motorlara kıyasla daha düşüktür. Mikro adımlama yöntemiyle yaklaşık 0,007°'ye kadar yüksek bir konumlandırma hassasiyeti elde edebilirsiniz.
- Adım motorları düşük hızlarda yüksek tork sağlar, pozisyon tutmada mükemmeldir ve uzun ömürlüdür.
- Adım motorunun rotoru büyük bir kütleye ve yüksek ataletliliğe sahiptir. Yüksek hızlı çalışma sırasında titreşime ve gürültüye eğilimlidir, bu da hareketin stabilitesini ve doğruluğunu etkiler. Bu, adım motorlarının önemli bir dezavantajıdır ve bu etkiyi azaltmak veya ortadan kaldırmak için önlemler alınması gerekir.
- Adım motorunun çalışma prensibi, kısa süreli anlık darbe kontrolü ile konum ve hızı kontrol etmektir. Uzun süreli çalışma, motorun kolayca ısınmasına, hatta yanmasına neden olabilir. Uzun süre kesintisiz çalışma gerektiren uygulamalar için adım motorları en iyi seçim olmayabilir.
Adım Motoru Kullanımları ve Uygulamaları
Adım motorları, karakteristikleri nedeniyle, basit konum kontrolü ve konumu koruma yeteneği gerektiren birçok uygulamada kullanılırlar, bunlar arasında şunlar yer alır:
1. 3D Yazıcılar
Adım motorları, 3B yazıcıların önemli bileşenlerinden biridir. Yazıcının türüne bağlı olarak çeşitli uygulamalarda kullanılabilirler. Örneğin, adım motorları bir ekstrüderi veya yapı platformunu x, y ve z eksenleri boyunca ayrı ayrı hareket ettirmek için kullanılır. Ekstrüder düzeneği genellikle filamenti ekstrüdere çeken bir adım motoruyla donatılmıştır.
Adım motorları, belirli bir aralığa kadar hareket edebilmeleri ve daha sonra bu konumda kalabilmeleri bakımından benzersizdir. Nesneleri tekrar tekrar sabit bir konuma getirebildikleri için genellikle robotlarda ve yazıcılarda kullanılırlar.
Adım motorları birçok boyutta mevcuttur. 3D yazıcılarda en sık kullanılan boyutlar NEMA 14, NEMA 17, NEMA 23 ve NEMA 24'tür.
2. CNC Makineleri
Adım motorları, servo motorlara alternatif bir seçenektir ve çoğu CNC makinesine güç sağlayabilir. CNC uygulamaları, önceden programlanmış bilgisayar yazılımlarının fabrika ve üretim ortamlarında takım tezgahlarının çalışmasını ve fiziksel hareketini kontrol ettiği çok çeşitli üretim süreçlerini kapsar.CNC uygulamalarında adım motorları genellikle servo motorlara göre daha "ekonomik" bir alternatif olarak görülse de, bu eski teknolojik bilgilere dayanan aşırı bir basitleştirmedir ve günümüzde her zaman tam olarak doğru değildir. Adım motorları, aynı güç için servo motorlardan daha ucuz olma eğilimindedir, ancak modern versiyonları da aynı derecede çok yönlüdür. Sonuç olarak, adım motorları daha yaygın uygulama alanına sahiptir ve takım tezgahlarından masaüstü bilgisayarlara ve otomobillere kadar daha geniş bir makine ve sistem yelpazesinde mevcuttur.
CNC adım motorları, servo motorlara göre kritik bir avantaja sahiptir; çünkü kodlayıcı gerektirmezler. Servo motorlar, adım motorlarına göre anlaşılması ve çalıştırılması doğası gereği daha zordur; çünkü güvenilir servo motorlardaki diğer birçok bileşene kıyasla arızaya daha yatkın olan kodlayıcılar içerirler. Adım motorları kodlayıcıya ihtiyaç duymaz, bu da onları teorik olarak servo motorlardan daha güvenilir kılar.
Ayrıca, adım motorları fırçasızdır (servo motorların aksine), yani yatakları iyi durumda olduğu sürece düzenli olarak değiştirilmeleri gerekmez.
3. Kamera Lensleri
Adım motorları, ileri teknoloji kamera teknolojisindeki çeşitli uygulamalarda yaygın olarak kullanılmaktadır. Lens içindeki otomatik odaklama ve diyafram ayarları gibi son derece hassas iç yapıları kontrol etmek için kullanılabilirler. Ayrıca, adım motorları güvenlik kameralarının ve uzaktan izleme sistemlerinin muhafazalarında ve harici mekanik yapılarında da uygulama alanı bulur.
Özellikle, adım motorları ve elektrikli kamera kaydırıcıları, kamera konumlandırma cihazlarının son derece düzgün çalışmasını sağlar. Bu, güvenlik cihazları tarafından yakalanan lenslerin güvenilir bir şekilde tutulabileceği ve kameranın görüş alanı etrafındaki fiziksel hareketlerinden kaynaklanan olası görüntü bozulma sorunlarının önlenebileceği anlamına gelir. Adım motorları, kamera ve video gözetim konumlandırma sistemleri için hareketsizken tam tork, tüm hareket girişleri için son derece hassas ve anında tepki süreleri, önceden programlanmış hareketlerin tutarlı tekrarlanabilirliği ve sabit adım boyutlarına dayalı basit açık döngü kontrolü gibi birçok cazip özellik sunar.
Yukarıdakilere ek olarak, adım motorları güvenlik, servis robotları, yazıcılar, tarayıcılar, tekstil makineleri, paketleme makineleri, kompakt disk sürücüleri ve akıllı aydınlatma vb. alanlarda da kullanılır.
